

三種H橋驅動方式
1、受限單極驅動
(高端驅動)負載與GND相連。
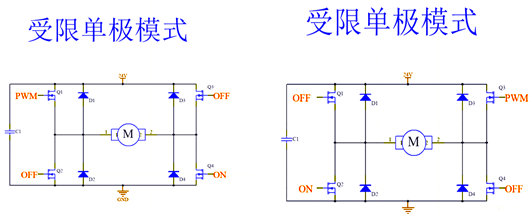
即H橋的上半橋臂用PWM控制,而下半橋臂常開。
T0時刻Q1接PWM,Q2、Q3關閉,Q4常開。Q1不能立即導通,D1導通短時間續流,電流I增大,電壓為U。t1時刻,Q1關斷,且不能立即關斷,D1導通短時間續流,之后D2導通續流。
t2時刻之后,Q3輸入PWM控制,Q1、Q4關,Q2常開。Q3不能立即導通,D3導通續流,電流反向增大,電壓為-U,t3時刻Q3關閉,且不能立即關閉,D3導通短時間續流,D4導通續流。
(低端驅動)負載于電源正極相連。
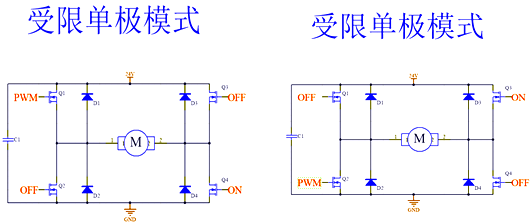
即上半橋臂導通,下半橋臂用PWM控制,相當于負載于電源正極相連。
低端驅動導通類似于高端驅動,不同的是下管關閉時續流環變成上橋臂與負載。
優點:控制方式簡單。
缺點:不能剎車
(借助這 4 個開關還可以產生電機的另外 2 個工作狀態:
A) 剎車 —— 將Q2 、Q4開關(或Q1、Q3)接通,則電機慣性轉動產生的電勢將被短路,形成阻礙運動的反電勢,形成“剎車”作用。
B) 惰行 —— 4個開關全部斷開,則電機慣性所產生的電勢將無法形成電路,從而也就不會產生阻礙運動的反電勢,電機將慣性轉動較長時間。)
不能能耗制動,在負載超過設定速度時不能提供反向力矩。調速靜差大,調速性能很差,穩定性也不好。
2、單極驅動
即對H橋一側的半橋輸入高級定時器產生的互補PWM控制
(高端驅動)即上橋臂輸入PWM控制,除PWMN控制的下橋臂的另一下橋臂常開。相當于負載與GND相連。
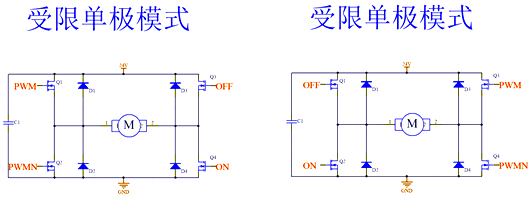
t0時刻Q1、Q4導通,電流I增加電壓為U,t1時刻Q1截止,Q2導通,電流I減小,電壓為電機產生的小負電壓,此時Q2、Q4形成通道續流。
(此時mos做續流通道有兩個好處
1.mos導通壓降低比二極管發熱少,效率更高
2.二極管不能產生反向電流,而mos管可以通過反向電流)
(低端驅動)即下橋臂輸入PWM控制,除PWMN控制的上橋臂的另一上橋臂常開。相當于負載與電源正極相連。
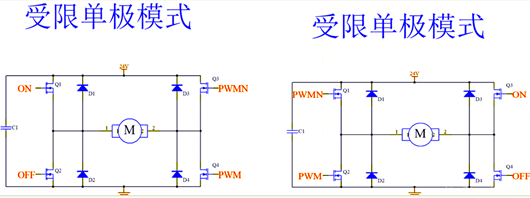
與單極高端驅動模式相似,只是把PWM的控制信號換到了下半橋,把常開的橋臂換到了上半橋,相當于把電機負載與電源正極相連。與高端驅動不同的是,低端驅動在PWM控制橋臂關閉時,電路的續流通道換為上橋臂導通續流。即Q1和Q3導通續流。
單極驅動模式
優點:啟動快,能加速,剎車,能耗制動,能量反饋,調速性能不如雙極模式好,但是相差不多,電機特性也比較好。如果接成H橋模式,也能實現反轉。
在負載超速時也能提供反向力矩。
缺點:剎車時,不能減速到0,速度接近0速度時沒有制動力。不能突然倒轉。動態性能不好,調速靜差稍大。
剎車:電機反電動勢在PWM關斷時間伏秒數會大于電源電壓在PWM開通時間加在電機上的伏秒數,即電機會產生反向電流,使電機產生反向力矩,如果這個力矩大的話,電機就可以剎車。反向電流還可以在PWM開通時反饋回母線電容和電池中,做到能量回饋,如果電池為二次電池,能量反饋是有好處的。
在控制PWM占空比時,占空比變大電機加速,占空比減小,速度減小。如果占空比在瞬間減小電機反電動勢伏秒值會很大,產生剎車的效果,如果占空比突然減小到零,相當于把電機短路,即把電機直接短路。這是急剎車,會對電機,mos管有損傷。
3、雙極模式
電樞電壓極性是正負交替的。需要兩組互補PWM同時對4個MOS管進行控制。
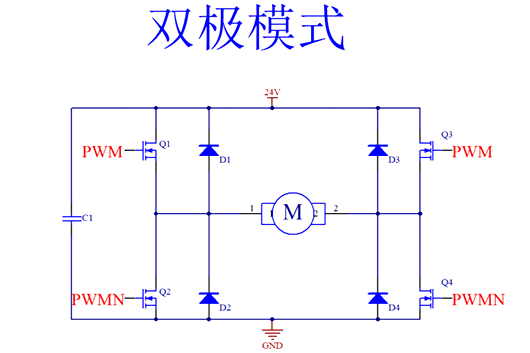
其中Q1和Q2是一組互補PWM,Q3和Q4是另一組互補PWM。
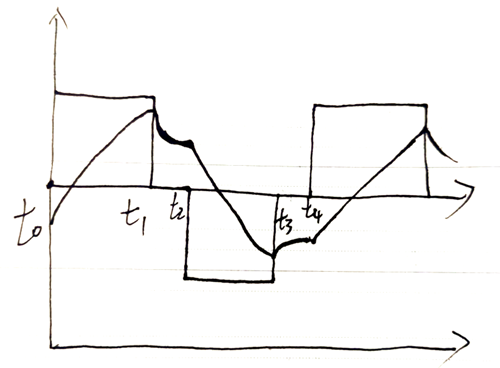
t0時刻Q1和Q4導通,t1時刻,Q3和Q4反向,因為Q3不能立即導通且感性負載電流方向不能突變所以D3導通續流。
t2時刻Q1和Q2反向,Q2、Q3、負載和母線電容續流,t3時刻,負載電流過零,Q2、Q3、負載和母線電容電流反向。
t4時刻Q3、Q4反向Q4不能立即導通,D4導通續流,t5時刻Q1、Q2反向。
下圖為全過程的電流,電壓圖:
優點:能正反轉運行,啟動快,調速精度高,動態性能好,調速靜差小,調速范圍大,能加速,減速,剎車,倒轉,能在負載超過設定速度時提供反向力矩,能克服電機軸承的靜態摩擦力,產生非常低的轉速。
缺點:控制電機復雜,在工作期間,4個MOS管都處于開關狀態,功耗大。
〈烜芯微/XXW〉專業制造二極管,三極管,MOS管,橋堆等,20年,工廠直銷省20%,上萬家電路電器生產企業選用,專業的工程師幫您穩定好每一批產品,如果您有遇到什么需要幫助解決的,可以直接聯系下方的聯系號碼或加QQ/微信,由我們的銷售經理給您精準的報價以及產品介紹
聯系號碼:18923864027(同微信)
QQ:709211280