

步進電機驅動器電路設計解析步進電機在控制系統中具有普遍的應用。它能夠把脈沖信號轉換成角位移,并且可用作電磁制動輪、電磁差分器、或角位移發作器等。有時從一些舊設備上拆下的步進電機(這種電機普通沒有損壞)要改作它用,普通需本人設計驅動器。
1. 步進電機驅動器的工作原理
步進電機驅動器的工作原理該步進電機為一四相步進電機,采用單極性直流電源供電。只需對步進電機的各相繞組按適宜的時序通電,就能使步進電機步進轉動。圖1是該四相反響式步進電機工作原理表示圖。
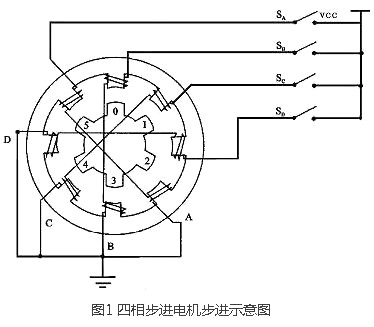
開端時,開關SB接通電源,SA、SC、SD斷開,B相磁極和轉子0、3號齒對齊,同時,轉子的1、4號齒就和C、D相繞組磁極產生錯齒,2、5號齒就和D、A相繞組磁極產生錯齒。
當開關SC接通電源,SB、SA、SD斷開時,由于C相繞組的磁力線和1、4號齒之間磁力線的作用,使轉子轉動,1、4號齒和C相繞組的磁極對齊。而0、3號齒和A、B相繞組產生錯齒,2、5號齒就和A、D相繞組磁極產生錯齒。依次類推,A、B、C、D四相繞組輪番供電,則轉子會沿著A、B、C、D方向轉動。
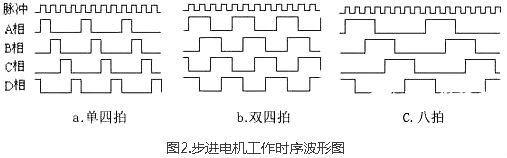
四相步進電機驅動器依照通電次第的不同,可分為單四拍、雙四拍、八拍三種工作方式。單四拍與雙四拍的步距角相等,但單四拍的轉動力矩小。八拍工作方式的步距角是單四拍與雙四拍的一半,因而,八拍工作方式既能夠堅持較高的轉動力矩又能夠進步控制精度。
單四拍、雙四拍與八拍工作方式的電源通電時序與波形分別如圖2.a、b、c所示:
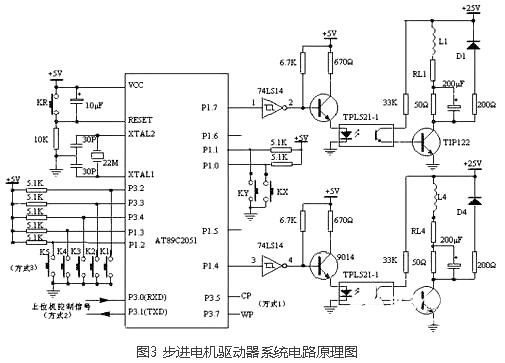
AT89C2051將控制脈沖從P1口的P1.4~P1.7輸出,經74LS14反相后進入9014,經9014放大后控制光電開關,光電隔離后,由功率管TIP122將脈沖信號停止電壓和電放逐大,驅動步進電機的各相繞組。
使步進電機隨著不同的脈沖信號分別作正轉、反轉、加速、減速和中止等動作。圖中L1為步進電機的一相繞組。AT89C2051選用頻率22MHz的晶振,選用較高晶振的目的是為了在方式2下盡量減小AT89C2051對上位機脈沖信號周期的影響。
圖3中的RL1~RL4為繞組內阻,50Ω電阻是一外接電阻,起限流作用,也是一個改善回路時間常數的元件。D1~D4為續流二極管,使電機繞組產生的反電動勢經過續流二極管(D1~D4)而衰減掉,從而維護了功率管TIP122不受損壞。
在50Ω外接電阻上并聯一個200μF電容,能夠改善注入步進電機繞組的電流脈沖前沿,進步了步進電機的高頻性能。與續流二極管串聯的200Ω電阻可減小回路的放電時間常數,使繞組中電流脈沖的后沿變陡,電流降落時間變小,也起到進步高頻工作性能的作用。
2.步進電機驅動器軟件設計
該驅動器依據撥碼開關KX、KY的不同組合有三種工作方式供選擇:
方式1為中綴方式:P3.5(INT1)為步進脈沖輸入端,P3.7為正反轉脈沖輸入端。上位機(PC機或單片機)與驅動器僅以2條線相連。
方式2為串行通訊方式:上位機(PC機或單片機)將控制命令發送給驅動器,驅動器依據控制命令自行完成有關控制過程。
方式3為撥碼開關控制方式:經過K1~K5的不同組合,直接控制步進電機。
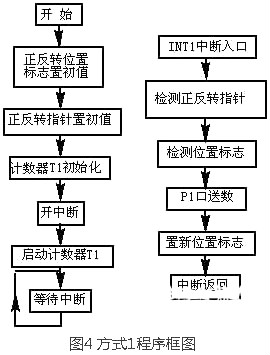
當上電或按下復位鍵KR后,AT89C2051先檢測撥碼開關KX、KY的狀態,依據KX、KY 的不同組合,進入不同的工作方式。以下給出方式1的程序流程框圖與源程序。
在程序的編制中,要特別留意步進電機在換向時的處置。為使步進電機驅動器在換向時能平滑過渡,不至于產生錯步,應在每一步中設置標志位。其中20H單元的各位為步進電機正轉標志位;21H單元各位為反轉標志位。
在正轉時,不只給正轉標志位賦值,也同時給反轉標志位賦值;在反轉時也如此。這樣,當步進電機換向時,就能夠上一次的位置作為起點反向運動,防止了電機換向時產生錯步。
3.步進電機驅動器細分驅動電路
為了對步進電機的相電流停止控制,從而到達細分步進電機步距角的目的,人們曾設計了很多種步進電機的細分驅動電路。隨著微型計算機的開展,特別是單片計算機的呈現,為步進電機驅動器的細分驅動帶來了便利。
目前,步進電機細分驅動電路大多數都采用單片微機控制。單片機依據請求的步距角計算出各相繞組中經過的電流值,并輸出到數模轉換器(DPA) 中,由DPA 把數字量轉換為相應的模仿電壓,經過環形分配器加到各相的功放電路上,控制功放電路給各相繞組通以相應的電流,來完成步進電機的細分。
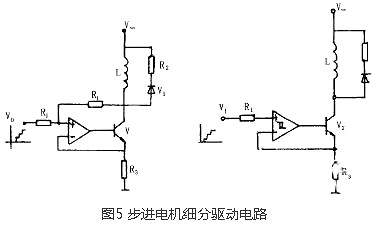
單片機控制的步進電機細分驅動電路依據末級功放管的工作狀態可分為放大型和開關型兩種(見下圖5)。
步進電機驅動器的概述
步進電機驅動器是將電脈沖信號轉變為角位移或線位移的開環控制元步進電機件。在非超載的情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響,當步進驅動器接收到一個脈沖信號,它就驅動步進電機按設定的方向轉動一個固定的角度,稱為“步距角”,它的旋轉是以固定的角度一步一步運行的。可以通過控制脈沖個數來控制角位移量,從而達到準確定位的目的;同時可以通過控制脈沖頻率來控制電機轉動的速度和加速度,從而達到調速的目的。
步進電機是一種感應電機,它的工作原理是利用電子電路,將直流電變成分時供電的,多相時序控制電流,用這種電流為步進電機供電,步進電機才能正常工作,驅動器就是為步進電機分時供電的,多相時序控制器。
雖然步進電機已被廣泛地應用,但步進電機并不能像普通的直流電機,交流電機在常規下使用。它必須由雙環形脈沖信號、功率驅動電路等組成控制系統方可使用。因此用好步進電機卻非易事,它涉及到機械、電機、電子及計算機等許多專業知識。步進電機作為執行元件,是機電一體化的關鍵產品之一,廣泛應用在各種自動化控制系統中。隨著微電子和計算機技術的發展,步進電機驅動器的需求量與日俱增,在各個國民經濟領域都有應用。
步進電機的主要分類
步進電機在構造上有三種主要類型:反應式(Variable Reluctance,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。
反應式:定子上有繞組、轉子由軟磁材料組成。結構簡單、成本低、步距角小,可達1.2°、但動態性能差、效率低、發熱大,可靠性難保證。
永磁式:永磁式步進電機驅動器的轉子用永磁材料制成,轉子的極數與定子的極數相同。其特點是動態性能好、輸出力矩大,但這種電機精度差,步矩角大(一般為7.5°或15°)。
混合式:混合式步進電機綜合了反應式和永磁式的優點,其定子上有多相繞組、轉子上采用永磁材料,轉子和定子上均有多個小齒以提高步矩精度。其特點是輸出力矩大、動態性能好,步距角小,但結構復雜、成本相對較高。
按定子上繞組來分,共有二相、三相和五相等系列。最受歡迎的是兩相混合式步進電機,約占97%以上的市場份額,其原因是性價比高,配上細分驅動器后效果良好。該種電機的基本步距角為1.8°/步,配上半步驅動器后,步距角減少為0.9°,配上細分驅動器后其步距角可細分達256倍(0.007°/微步)。由于摩擦力和制造精度等原因,實際控制精度略低。同一步進電機驅動器可配不同細分的驅動器以改變精度和效果。
步進電機和驅動器的選擇方法
判斷需多大力矩:靜扭矩是選擇步進電機驅動器的主要參數之一。負載大時,需采用大力矩電機。力矩指標大時,電機外形也大。
判斷電機運轉速度:轉速要求高時,應選相電流較大、電感較小的電機,以增加功率輸入。且在選擇驅動器時采用較高供電電壓。
選擇電機的安裝規格:如57、86、110等,主要與力矩要求有關。
確定定位精度和振動方面的要求情況:判斷是否需細分,需多少細分。
根據電機的電流、細分和供電電壓選擇驅動器。
步進電機的工作原理
通常電機的轉子為永磁體,當電流流過定子繞組時,定子繞組產生一矢量磁場。該磁場會帶動轉子旋轉一角度,使得轉子的一對磁場方向與定子的磁場方向一致。當定子的矢量磁場旋轉一個角度。轉子也隨著該磁場轉一個角度。每輸入一個電脈沖,電動機轉動一個角度前進一步。它輸出的角位移與輸入的脈沖數成正比、轉速與脈沖頻率成正比。改變繞組通電的順序,電機就會反轉。所以可用控制脈沖數量、頻率及電動機各相繞組的通電順序來控制步進電機的轉動。
步進電機驅動器的發熱原理
通常見到的各類電機,內部都是有鐵芯和繞組線圈的。繞組有電阻,通電會產生損耗,損耗大小與電阻和電流的平方成正比,這就是我們常說的銅損,如果電流不是標準的直流或正弦波,還會產生諧波損耗;鐵心有磁滯渦流效應,在交變磁場中也會產生損耗,其大小與材料,電流,頻率,電壓有關,這叫鐵損。銅損和鐵損都會以發熱的形式表現出來,從而影響電機的效率。步進電機一般追求定位精度和力矩輸出,效率比較低,電流一般比較大,且諧波成分高,電流交變的頻率也隨轉速而變化,因而步進電機普遍存在發熱情況,且情況比一般交流電機嚴重。
步進電機的主要構造
步進電機也叫步進器,它利用電磁學原理,將電能轉換為機械能,人們早在20世紀20年代就開始使用這種電機。隨著嵌入式系統(例如打印機、磁盤驅動器、玩具、雨刷、震動尋呼機、機械手臂和錄像機等)的日益流行,步進電機的使用也開始暴增。不論在工業、軍事、醫療、汽車還是娛樂業中,只要需要把某件物體從一個位置移動到另一個位置,步進電機就一定能派上用場。步進電機有許多種形狀和尺寸,但不論形狀和尺寸如何,它們都可以歸為兩類:可變磁阻步進電機和永磁步進電機。步進電機是由一組纏繞在電機固定部件--定子齒槽上的線圈驅動的。通常情況下,一根繞成圈狀的金屬絲叫做螺線管,而在電機中,繞在齒上的金屬絲則叫做繞組、線圈、或相。
步進電機的靜態指標術語
1、相數:產生不同對極N、S磁場的激磁線圈對數。常用m表示。
2、拍數:完成一個磁場周期性變化所需脈沖數或導電狀態用n表示,或指電機轉過一個齒距角所需脈沖數,以四相電機為例,有四相四拍運行方式即AB-BC-CD-DA-AB,四相八拍運行方式即 A-AB-B-BC-C-CD-D-DA-A。
3、步距角:對應一個脈沖信號,電機轉子轉過的角位移用θ表示。θ=360度/(轉子齒數*運行拍數),以常規二、四相,轉子齒為50齒電機為例。四拍運行時步距角為θ=360度/(50*4)=1.8度(俗稱整步),八拍運行時步距角為θ=360度/(50*8)=0.9度(俗稱半步)。
4、定位轉矩:電機在不通電狀態下,電機轉子自身的鎖定力矩(由磁場齒形的諧波以及機械誤差造成的)。
5、靜轉矩:電機在額定靜態電作用下,電機不作旋轉運動時,電機轉軸的鎖定力矩。此力矩是衡量電機體積的標準,與驅動電壓及驅動電源等無關。 雖然靜轉矩與電磁激磁安匝數成正比,與定齒轉子間的氣隙有關,但過分采用減小氣隙,增加激磁安匝來提高靜力矩是不可取的,這樣會造成電機的發熱及機械噪音。
步進電機的動態指標術語
1、步距角精度:步進電機驅動器每轉過一個步距角的實際值與理論值的誤差。用百分比表示:誤差/步距角*100%。不同運行拍數其值不同,四拍運行時應在5%之內,八拍運行時應在15%以內。
2、失步:電機運轉時運轉的步數,不等于理論上的步數。稱之為失步。
3、失調角:轉子齒軸線偏移定子齒軸線的角度,電機運轉必存在失調角,由失調角產生的誤差,采用細分驅動是不能解決的。
4、最大空載起動頻率:電機在某種驅動形式、電壓及額定電流下,在不加負載的情況下,能夠直接起動的最大頻率。
5、最大空載的運行頻率:電機在某種驅動形式,電壓及額定電流下,電機不帶負載的最高轉速頻率。
6、運行矩頻特性:電機在某種測試條件下測得運行中輸出力矩與頻率關系的曲線稱為運行矩頻特性,這是電機諸多動態曲線中最重要的,也是電機選擇的根本依據。其它特性還有慣頻特性、起動頻率特性等。 電機一旦選定,電機的靜力矩確定,而動態力矩卻不然,電機的動態力矩取決于電機運行時的平均電流(而非靜態電流),平均電流越大,電機輸出力矩越大,即電機的頻率特性越硬。要使平均電流大,盡可能提高驅動電壓,采用小電感大電流的電機。
7、電機的共振點:步進電機均有固定的共振區域,二、四相感應子式的共振區一般在180-250pps之間(步距角1.8度)或在400pps左右(步距角為0.9度),電機驅動電壓越高,電機電流越大,負載越輕,電機體積越小,則共振區向上偏移,反之亦然,為使電機輸出電矩大,不失步和整個系統的噪音降低,一般工作點均應偏移共振區較多。
8、電機正反轉控制:當電機繞組通電時序為AB-BC-CD-DA或()時為正轉,通電時序為DA-CD-BC-AB或()時為反轉。
步進電機驅動器的主要特點
1、一般步進電機的精度為步進角的3-5%,且不累積。
2、步進電機外表允許的最高溫度。
步進電機溫度過高首先會使電機的磁性材料退磁,從而導致力矩下降乃至于失步,因此電機外表允許的最高溫度應取決于不同電機磁性材料的退磁點;一般來講,磁性材料的退磁點都在攝氏130度以上,有的甚至高達攝氏200度以上,所以步進電機外表溫度在攝氏80-90度完全正常。
3、步進電機的力矩會隨轉速的升高而下降。
當步進電機轉動時,電機各相繞組的電感將形成一個反向電動勢;頻率越高,反向電動勢越大。在它的作用下,電機隨頻率(或速度)的增大而相電流減小,從而導致力矩下降。
4、步進電機低速時可以正常運轉,但若高于一定速度就無法啟動,并伴有嘯叫聲。
步進電機有一個技術參數:空載啟動頻率,即步進電機驅動器在空載情況下能夠正常啟動的脈沖頻率,如果脈沖頻率高于該值,電機不能正常啟動,可能發生丟步或堵轉。在有負載的情況下,啟動頻率應更低。如果要使電機達到高速轉動,脈沖頻率應該有加速過程,即啟動頻率較低,然后按一定加速度升到所希望的高頻(電機轉速從低速升到高速)。
步進電動機以其顯著的特點,在數字化制造時代發揮著重大的用途。伴隨著不同的數字化技術的發展以及步進電機本身技術的提高,步進電機將會在更多的領域得到應用。
步進電機的主要特性
1、步進電機必須加驅動才可以運轉,驅動信號必須為脈沖信號,沒有脈沖的時候,步進電機靜止,如果加入適當的脈沖信號,就會以一定的角度(稱為步角)轉動。轉動的速度和脈沖的頻率成正比。
2、三相步進電機的步進角度為7.5度,一圈360度,需要48個脈沖完成。
3、步進電機具有瞬間啟動和急速停止的優越特性。
4、改變脈沖的順序,可以方便的改變轉動的方向。
因此,打印機、繪圖儀、機器人等設備都以步進電機驅動器為動力核心。
步進電機驅動器的優點和缺陷
優點
1、電機旋轉的角度正比于脈沖數;
2、電機停轉的時候具有最大的轉矩(當繞組激磁時);
3、由于每步的精度在百分之三到百分之五,而且不會將一步的誤差積累到下一步因而有較好的位置精度和運動的重復性;
4、優秀的起停和反轉響應;
5、由于沒有電刷,可靠性較高,因此電機的壽命僅僅取決于軸承的壽命;
6、電機的響應僅由數字輸入脈沖確定,因而可以采用開環控制,這使得電機的結構可以比較簡單而且控制成本;
7、僅僅將負載直接連接到電機的轉軸上也可以極低速的同步旋轉;
8、由于速度正比于脈沖頻率,因而有比較寬的轉速范圍。
缺陷
1、如果控制不當容易產生共振;
2、難以運轉到較高的轉速;
3、難以獲得較大的轉矩;
4、在體積重量方面沒有優勢,能源利用率低;
5、超過負載時會破壞同步,高速工作時會發出振動和噪聲。
烜芯微專業制造二三極管,MOS管,20年,工廠直銷省20%,1500家電路電器生產企業選用,專業的工程師幫您穩定好每一批產品,如果您有遇到什么需要幫助解決的,可以點擊右邊的工程師,或者點擊銷售經理給您精準的報價以及產品介紹
烜芯微專業制造二三極管,MOS管,20年,工廠直銷省20%,1500家電路電器生產企業選用,專業的工程師幫您穩定好每一批產品,如果您有遇到什么需要幫助解決的,可以點擊右邊的工程師,或者點擊銷售經理給您精準的報價以及產品介紹